OmniSlam SR-RL6 is a portable rotating laser panoramic mapping robot, which is a portable 3D real scene data catcher in large space. Modular design concept, can be configured with additional panoramic camera, GNSS and other functional modules. With flexible structural design and optimized SLAM algorithm, the advantages of single lidar in spatial 3D structural data acquisition are illustrated.
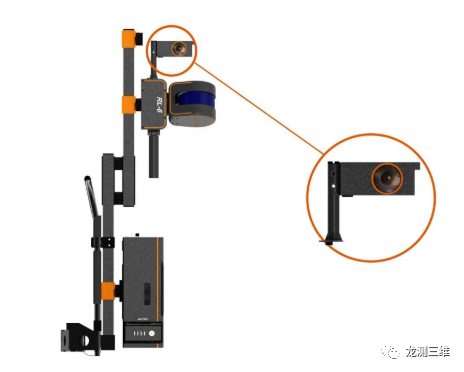
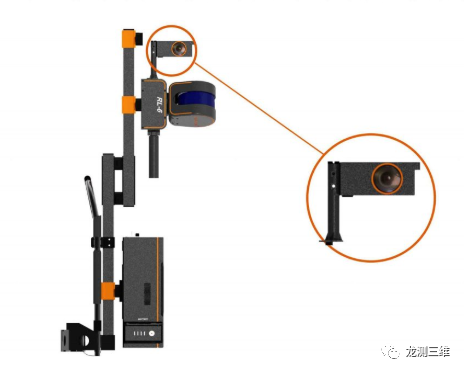
Rotary lidar
OmniSlam Technology redefines the scanning mode, combines the motor with the laser radar, the motor drives the laser radar to rotate clockwise, scans the spatial structure 360 degrees, without dead Angle, and independently develops the rotary point cloud stitching algorithm.
Centimetre accuracy
The SLAM technology developed by OmniSlam can obtain point cloud data with centimeter-level accuracy in closed loop operation, indoor or ground survey area, irregular underground space survey area without the introduction of control points.
Diversified operation scenarios
The SR-RL6 is suitable for drawing, modeling and result analysis in non-motorway, parking lot, mine pile, roadway, pipe corridor, forest, construction and other scenarios with various operation modes such as hand holding or carrying.
Multiple modes of operation
The product is equipped with a backpack hanger, supporting hand-held, front-mounted, rear mounted, cart mounted, battery car mounted, dog mounted and other operating modes, you can choose the appropriate operation mode according to the needs of the project, improve production efficiency.
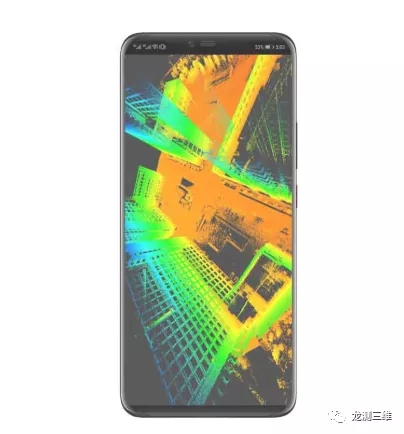
View point cloud model in real time
You can choose to use mobile phones and other mobile terminals to view the point cloud model of the current collection time in real time, view the current working status of the equipment, and control the operation process. During the operation, you can check and correct the defects, and users will not have to rework twice.
Wireless connection
The SR-RL6 does not require cable connection. Users can use mobile devices such as mobile phones to connect to THE WIFI of the SR-RL6 to control device data collection and check device status, improving operation security.
Technical parameters
>>>>Function Expansion 1
GNSS module is added
On the basis of sr-RL6 hardware configuration, GNSS high-precision module is added, and rTK-SLAM ® technology is used for data production. As long as the RTK fixed solution data on some paths are obtained in the process of operation, the RTK fixed solution data can participate in the joint solution and improve the precision of high point cloud in the process of data solution. At the same time, the imported seven parameters can convert point cloud coordinates to target coordinate system, the field does not need to obtain control points by secondary frame station, and the field does not need to manually select points. The production efficiency of field data and the processing efficiency of internal data can be improved several times.

The GNSS high-precision module supports GPS, GLONASS, Galileo, BDS, SBAS, QZSS and other satellite navigation systems, and users can realize RTK function by using the thousand seek position or CORS station. Rtk-slam ® technology is mainly suitable for data production tasks in outdoor multi-million square meter survey areas, ensuring point cloud accuracy and improving operational efficiency.
>>>>Function Expansion 2
Add panoramic camera
In SR - RL6 hardware configuration based on extra consumer panoramic camera, use of panoramic camera recorded the scene, auxiliary distinguish features, see the feature attributes, open image data and its position at the same time, the user can use image data in third-party software, extra consumer panoramic camera can be acquired at a lower cost huge function.
>>>>Software
OmniSLAM® Capturer
OmniSLAM® CapStorm is a data collection software that's received a storm of applause. That's what's expected of us. It's a mobile device that controls data collection and status viewing.
✔One-click device initialization is supported without the need for the 8-character route
✔Real-time view power, storage, data and other parameters
✔Set the account password to connect to chihiro location, CORS station, etc
✔Optional View the point cloud model and route of the current scenario
OmniSLAM® Mapper
OmniSLAM ® Mapper software is oz company (Beijing) intelligent technology co., LTD., independent research and development of a data processing software, the original solution for point cloud data, pictures, track data, interface simple, using the logic is simple, less click operation, with automatic processing capabilities, can provide users with complete various scenarios of calculating data services, Ensure priority delivery of results.
✔Loading data is processed automatically without manual intervention
✔Delete the noise caused by the operator
✔Real-time display of data processing process, grasp the processing progress
✔In Windows, the higher the CPU frequency, the faster the CPU speed
✔The projection parameters and seven parameters are converted to the CGCS2000 geodetic coordinate system
✔Batch processing of multi-segment data
✔Export the position and attitude data of the working path
✔Support to increase the density of point cloud model and enrich the details
✔RTK control points were introduced to correct deviation and optimize model precision twice
✔The panoramic images and single lens images with different resolutions and intervals are exported
OmniSLAM® Viewer
OmniSLAM® Viewer is a data application software independently developed by Osley (Beijing) Intelligent Technology Co., LTD. It has regular functions such as point cloud and free navigation of panoramic images.
✔True color, EDL and other display methods
✔1:1 matching of point cloud model and panoramic image
✔Point cloud model measurement, location, length, etc
✔Point cloud, image and track display, supporting quick navigation
>>>>Industry application
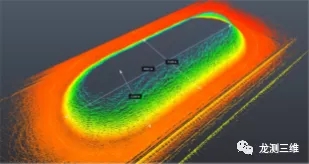
The volume to calculate
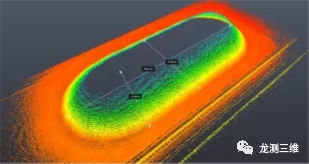
SR-RL6 can be used to obtain the point cloud model of irregular solid structure such as the heap and calculate the volume, area or capacity.
The following figure shows a coal pile 88.8 meters long, 37.8 meters wide and 30 meters high in a warehouse of a factory. Sr-rl6 handheld scanner is used to measure the coal pile. It takes about 4 minutes to collect the data by walking around the coal pile, and about 15 minutes to calculate the data by using OmniSLAM" Mapper software. Finally, the third party software is used to calculate the coal pile cubic volume.
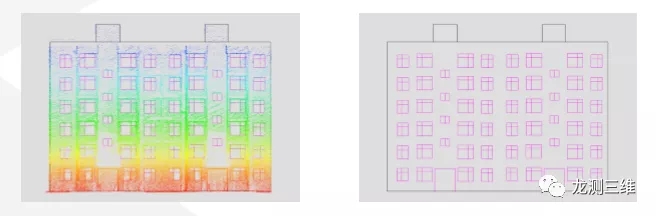
Elevation measurement
SR-RL6 can obtain the high-precision point cloud model of building structure, support the reconstruction of building facades, landscape, square, greening, parking lot and other site facilities, and survey the illegal construction situation.
The figure below shows the point cloud and line drawing of facade reconstruction of a residential district. Sr-rl6 handheld scanner was used to scan the building facade to obtain the original data, and OmniSLAM° Mapper software was used to calculate the data. Finally, CAD or other software was used to draw the construction drawing of the building facade reconstruction design.
Modeling
SR-RL6 can obtain the point cloud model inside the building, which can be used to realize indoor modeling, interior design, space transformation, etc., and can also assist the preparation of fire emergency plan.
The following figure shows the process of building interior from point cloud model to 3D model. Sr-rl6 was used to build the point cloud model. SketchUp made the 3D model after loading the point cloud, and then modified and applied the 3D model.

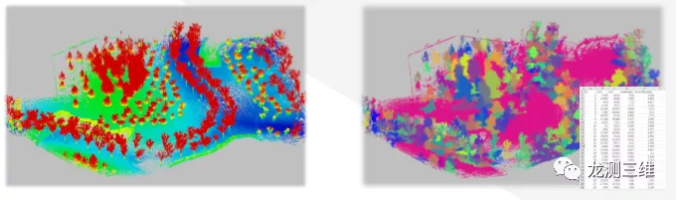
Extraction of tree information
SR-RL6 can accurately obtain three-dimensional point cloud of trees, use automatic processing software for point cloud single tree segmentation, and extract tree crown, DBH and tree height information based on single tree data generated by point cloud segmentation.
The following figure shows the point cloud data of a park artificial forest. Sr-rl6 was used to scan trees and obtain the original data. GNSS module was used this time, so there was no need to close the loop of operation path and limit the operation scope or time. Finally, the tree point cloud data with geodetic coordinates can be obtained. The DBH and tree height information can be extracted by using the single tree segmentation and statistics function of the third party software.
Joint mapping of underground, aboveground and interior Spaces
SR-RL6 can be used for joint mapping of underground space, aboveground space and interior space. RTK control points can be obtained in real time in the aboveground space. Through joint solution of RTK-SLAM° algorithm, geodetic coordinates can be assigned to underground or interior space objects.
The following figure shows the joint mapping of the ground, shopping mall and underground corridor of a certain area and the elevator connection. The 40% transparency is set with CAD software, and various building facilities can be clearly seen.
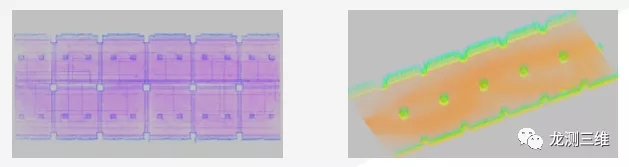
Indoor structure
The indoor point cloud obtained by SR-RL6 can accurately represent the ventilation pipe, window, column and other structures, and the three-dimensional relationship between each structure is accurate and accurate.
The following figure shows the single-storey indoor structure of an office building. Columns, Windows and ventilation pipes can be clearly identified from the point cloud.
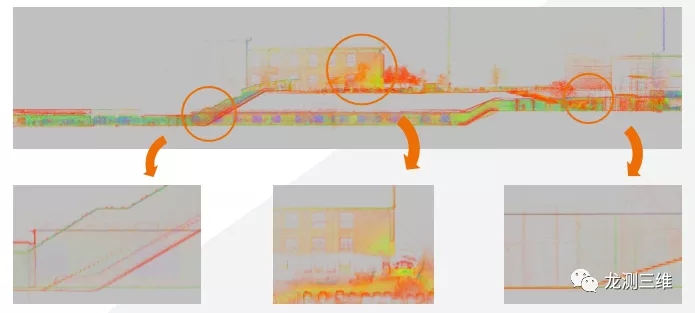
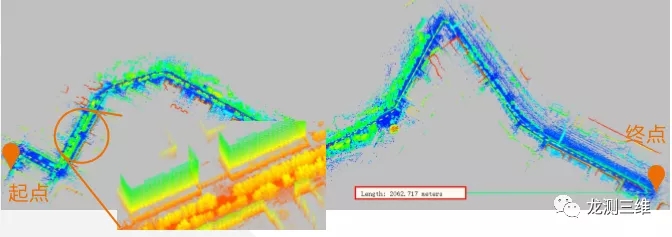
Non-motor lane
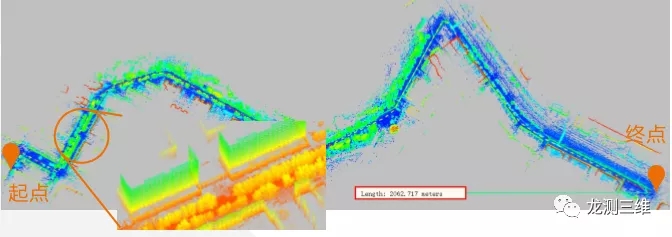
When sr-RL6 is connected to GNSS, it is not confined to closed-loop or short-distance paths, and is very suitable for non-motorized lanes such as linear or difficult to form closed-loop survey areas. Non-motorized lanes can measure structural information such as roadside trees, flower beds, floor coverings and building facades.
The following figure shows a highway with a distance of about 2 km. After sr-RL6 is used to access GNSS, multiple types of ground object information with CGCS2000 and other geodetic coordinates can be obtained along the road.
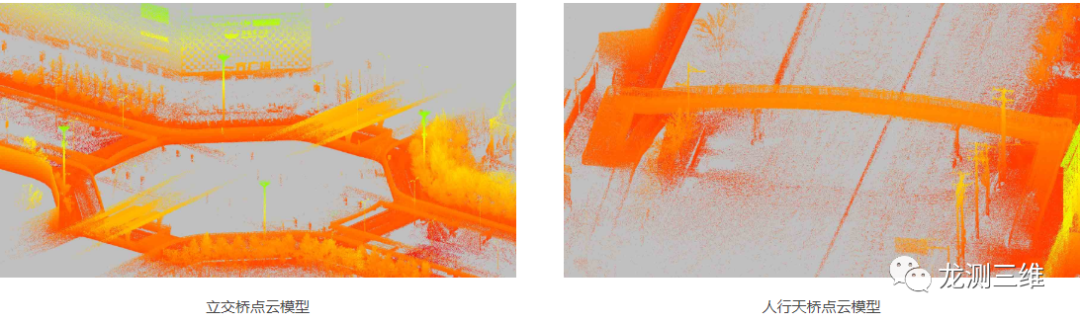
Viaduct/station
The SR-RL6 can be measured under the viaduct to complement the survey area of the vehicle-mounted liDAR scanning system. The point cloud has coordinates consistent with the data measured on the vehicle, and the indoor space structure of the station can be measured at one time. The figure on the right shows the point cloud model of a viaduct, the station and the surrounding environment.
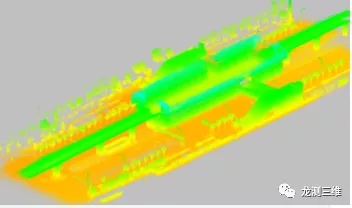
Residential
SR-RL6 measuring residential district, can be applied to residential building facade reconstruction, park landscape reconstruction, etc.
As shown in the figure below, there are 23 buildings in a residential community with a length of about 448 meters, a width of about 213 meters and an area of about 95,424 square meters. The data collection takes about 30 minutes.
Overpass/flyover
The SR-RL6 is capable of measuring areas that are difficult to be measured by vehicle-mounted scanning systems, such as overpasses and overpasses, and can make up for scattered areas of the test area. The figure on the right shows the second road of a ring overpass and its surrounding environment.
In addition, SR-RL6 can also be used for surveying and mapping of power lines, pylons, power distribution rooms, factories, tanks, roadways, pipe corridors and BIM applications.

 ∷
∷ 























 Sweep WeChat yards pay attention to us
Sweep WeChat yards pay attention to us